3次元点群作成ソフトウェア「MAP IV Engine」の v2.2.0 を、2026年1月6日より提供開始しました。
本アップデートでは、点群精度と操作性の両立をテーマに、点群の品質向上と業務効率化を実現する新機能の追加および機能改善を行いました。
アップデート概要
MAP IV Engine v2.2.0では、点群データを補間し点密度を向上させる「アップサンプリング」機能や、SLAM処理後に軌跡をより高精度に推定する「Pose Refiner」を新たに搭載しました。
さらに、これまでコマンドライン(CLI)操作が必要だった「地図融合」や「GCP補正」などの高度な処理をGUI上で直感的に行えるようにするほか、長時間の計測データから必要な区間のみを指定してSLAM処理を行える機能を追加するなど、実務での使いやすさを大きく向上させています。
主な新機能
点群アップサンプリング
路面や天井など点密度が低い箇所を自動的に検出し、点を補間することで隙間を埋め、3次元点群の密度を向上します。


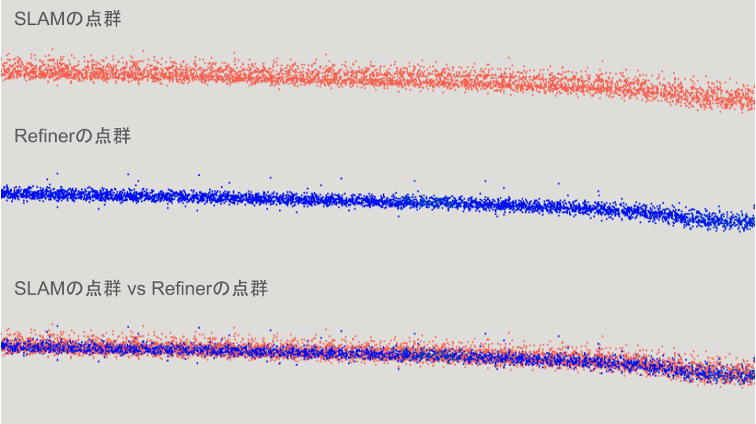
Pose Refiner(軌跡高精度化)
SLAM処理後に軌跡を再推定することで、点群の「厚み」や「二重化」を大幅に低減します。各点の座標を加工しないため、点群シャープニング(圧着モード)が使用できない測量業務など、点座標の改変が許容されないシーンでも利用可能です。
機能改善
地図融合のGUI対応
複数の地図データを統合する処理が画面操作(GUI:Graphical User Interface)上で完結可能となり、操作性が大きく向上しました。
GCP(標定点)補正のGUI対応
CSVファイルによるGCPの一括読み込み、ID管理、表示切替などをGUIで直感的に操作可能になりました。
ユーザビリティ・処理柔軟性の向上
- SLAM部分処理:長時間の計測データから、必要な時間帯のみを切り出して処理可能に
- 予測誤差の可視化:軌跡の予測誤差をKMLに反映し、Google Earth等で位置情報の信頼度(Low / Medium / High)を色分け表示
- パイプライン柔軟性向上:ノイズ除去後など、パイプライン処理途中の結果を他のワークフローで再利用可能に
主な不具合修正
- GNSS同期計測システムにおけるTimestamp関連バグの修正
- 特定のタイミングで計測が終了した場合に発生するエラーの修正
- その他、多数の軽微な不具合修正
ユーザーにとっての主なメリットと効果
- 3次元点群の密度向上: 点群アップサンプリング機能により3次元点群の地図データの密度が向上し、後工程における点群活用の利便性が向上します。
- 軌跡高精度化: Pose Refinerにより、振動や誤差による点群のブレ(厚み)を抑え、よりシャープで正確な3次元地図の作成を実現します。
- 作業工数の削減: これまでコマンドライン(CLI)にのみ実装されていた「地図融合」や「GCP補正」などの複雑な処理が画面操作(GUI)で完結するため、専門知識がない担当者でも高度な処理が可能になります。
- データ処理の柔軟性向上: 計測データ全体だけでなく、特定の時間帯のみを指定して地図化できるため、必要な区間だけを効率的に地図化可能です。
その他情報
- サポートスケジュール:v2.2.0は先行提供版となります。2026年4月頃に予定している v2.3.0 のリリースをもって、本バージョンのサポートは終了予定です。
- アップデート実施日:2026年1月6日