Autonomous Driving Integration
マップフォーでは、自動運転技術を実際の走行環境に導入し、安全で効率的な運用を実現するための一連のソリューションを提供しています。
特定の自動運転システムの導入・運用支援から、自動運転技術の活用・応用まで、幅広く対応しています。
Autowareを用いたフルスタックソリューション
世界初のオープンソースの自動運転ソフトウェア「Autoware」を用いた自動運転システムの開発を幅広くサポートします。
マップフォーは、3次元地図作成・位置推定・環境認識技術に基づいたAutowareの研究開発や実用化を推進しています。Autowareの導入・運用に関する包括的なコンサルティング支援が可能です。
※「Autoware」は、Robot Operating System(ROS)をベースとした、オープンソースの自動運転車向けソフトウェアです。自動走行車両の位置推定、物体検出から経路計画・制御まで、自律走行に必要なすべての機能を備えており、自律走行技術のオープンイノベーションに、より多くの個人や組織が貢献できることを目指して作られました。
※「Autoware」は、The Autoware Foundation の登録商標です。
自動運転システムコンポーネント
自動運転システムは、自動運転車両が正確かつ安全に動作するために、次のコンポーネントで構成されています。
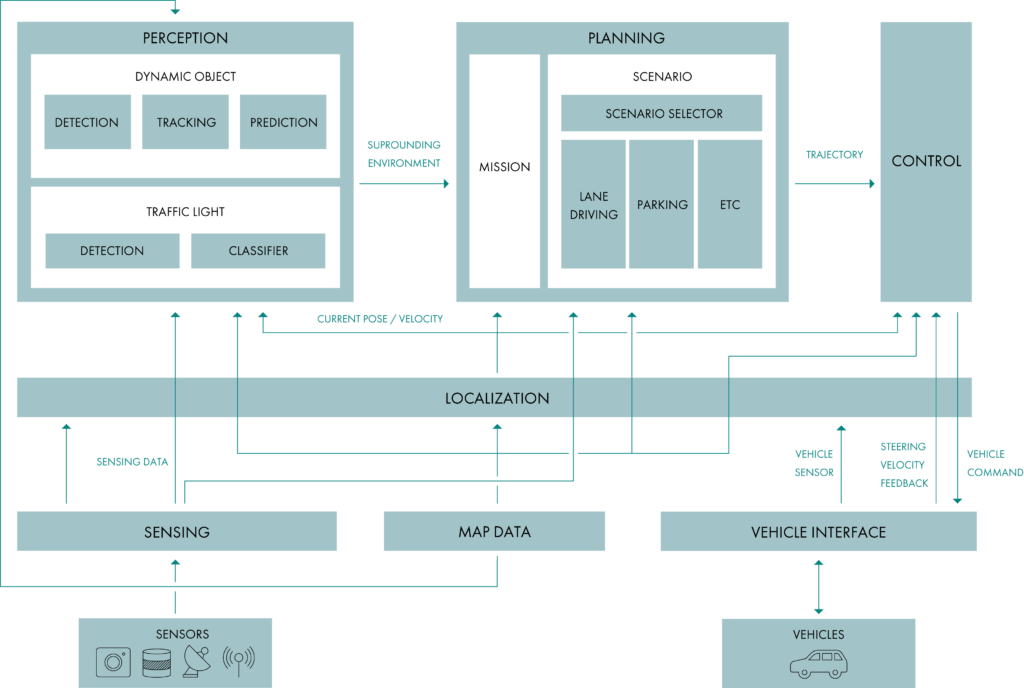
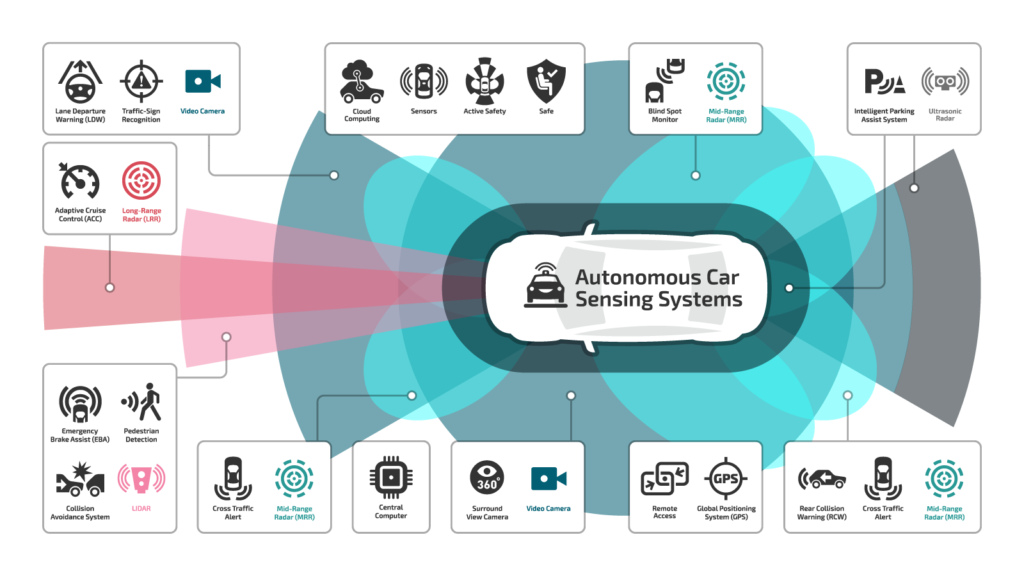
1. SENSING (センシング)
LiDAR、レーダー、カメラ、GNSSなどのセンサーを使用して、周囲の環境情報を取得します。
2. MAP (マップ)
高精度の地図データを用いて、システムが認識・判断・操作の各タスクを高度に実現できるようにします。
3. LOCALIZATION (ローカライゼーション)
3次元地図やLiDAR、GNSSを活用して、車両の正確な位置を特定します。
4. PERCEPTION (パーセプション)
センサーデータを処理し、周囲の移動体、地物、状況などを検出し、障害物の位置と周囲の環境を認識します。
5. PLANNING (プランニング)
運転タスクを計画し、車両の次の動作を決定します。
6. CONTROL (コントロール)
車両を制御し、計画された運転動作を実行します。
支援可能領域
自動運転車両を走行する環境に合わせて、ODD (Operational Design Domain) 設計、性能要件定義、システム構成定義、車両適合、シミュレータを用いた性能評価、フィールドオペレーションなど、自動運転システムの導入に関わる技術領域を支援します。
- ODD設計
- 性能要件定義
- システム構成定義
- センサー構成・位置設計
- 自動運転車両構築
- 車両適合
- シナリオ評価
- 自動運転システム性能評価
- フィールドオペレーション
サポートの特徴
- 包括的な技術サポート
マップフォーには、3次元地図作成や位置推定、パーセプション領域など周辺技術に関する高度な専門知識を持つエンジニアチームがあります。ユーザーの要望に合わせた包括的なコンサルティングサポートを提供します。
- 導入後の継続的な運用サポート
自動運転システムは、周辺環境の変化に伴う地図の更新や、日々改良されているソフトウェアアップデートへの対応など、導入後も継続した運用支援が必要です。マップフォーでは、システムが安全かつ効率的に運用されるよう継続したサポート体制を備えています。
- カスタマイズ
自動運転システムには複数の高度な技術が使用されており、ユニークな環境条件への適用やシステムのカスタマイズには多くの経験や知識を必要とします。マップフォーでは、公道、オフロードに加えて、特徴量がない場所や衛星情報を受信しにくい環境への実装支援も多数経験しています。
次のケースも支援可能です

空港、農地など、
特徴量のない開けた場所

森の中や屋内など、
衛星情報を受信できない場所

GNSS精度が落ちる
高層ビルが立ち並ぶ都市部
お見積・各種ご相談は、フォームよりお問い合わせください。
 " alt="">
" alt="">