Kunihiro Ueda Jun 8, 2022
はじめまして、マップフォーで位置推定技術の開発をしている上田です。
このたび、LiDARと路面反射強度地図を使った自己位置推定システム「Hawkeye」を実装し、オープンソースで公開しました。Hawkeyeは、参考論文[1]の追実装であり、GNSS/INSの推定姿勢のうちx座標とy座標をLiDARの反射強度と路面反射強度地図との一致度で補正しています。
この記事では、Hawkeyeの推定手法と実装について解説します。
概要
自動運転システムにおいて自車の位置姿勢推定は最も重要な要素技術の一つですが、システム毎に活用できる地図やセンサーは千差万別です。
マップフォーでは、Autowareに実装されている、3次元点群地図と3次元LiDARによる位置推定を中心に開発、利用していますが、他の位置推定手法のとの比較のために、他の自動運転システムで活用されている路面反射強度地図とLiDARのスキャンマッチングに着目し、参考論文を追実装しました。この手法はAutowareに実装されているNDTスキャンマッチングとは異なり、3次元点群では無く、オルソ画像を地図として使用するため、地図のサイズが小さくなるというメリットがあります。
本実装では参考論文で利用されているミリ波レーダを使わないほか、GNSS/INSとしてEagleyeを想定しています。また、サンプル等をそのまま実行した場合にはLiDAR点群はそのまま使用していますが、途中にROSノードを追加するなどで地面点群のみを抽出してから実行することで、より良い精度になります。
構成
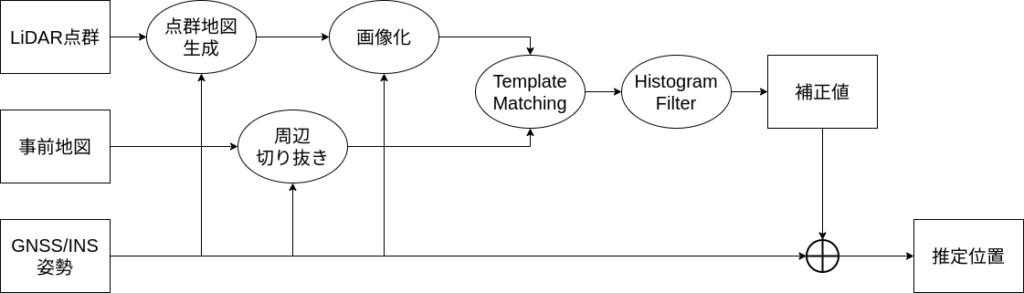
Hawkeyeの構成は上の図のようになっていて、すべて一つのROSノードで実行されます。
実行の流れは次のとおりです:
- LiDARデータをGNSS/INSに従って点群のままマッピングする。
- 点群地図から自己位置周辺の反射強度の画像地図を作成する。
- 画像地図を事前地図とテンプレートマッチングする。
- 比較結果をヒストグラムフィルタとしてGNSS/INS姿勢の補正値を推定する。
それぞれの段階を順番に説明します。
マッピングと周辺の反射強度地図の作成
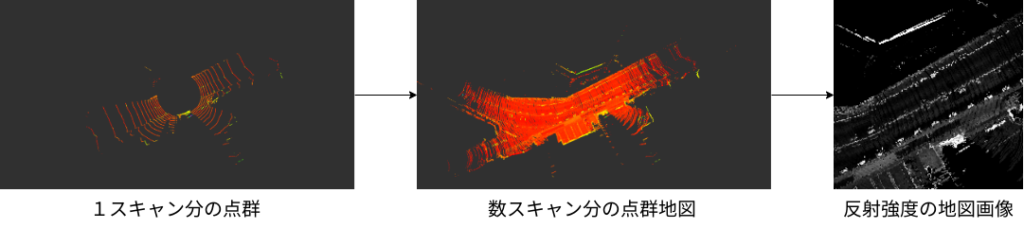
この手法ではLiDAR点群と地図画像を比較しますが、LiDARスキャン1回分のデータでは密度が低いです。そこで、LiDAR点群をGNSS/INSの位置姿勢に従ってマッピングします。そして、画像の地図との比較をするために、蓄積された点群地図から現在の自己位置の周囲の点を抜き出して反射強度を画像の地図にします。
テンプレートマッチング、ヒストグラムと位置補正
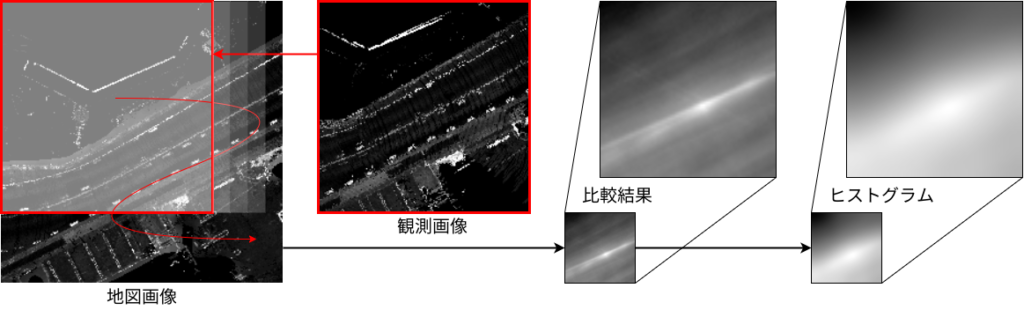
自己位置周辺の反射強度の地図ができたら、事前地図との一致度をテンプレートマッチングで計算します。テンプレートマッチングとは、対象画像の中からテンプレート画像との一致度が高い部分を探すための方法で、上図の左側のように、対象画像の、テンプレート画像と同じ大きさの部分画像をすべて走査して、テンプレート画像との一致度を計算して、一致度を持った画像を生成します。地図全域と比較するのは計算コストが大きいので、GNSS/INSの姿勢の周辺の事前地図のみを使います。
事前地図との一致度が高い箇所が自己位置が高い場所です。そこで、一致度画像をヒストグラムフィルタとして、画像の重心の位置を補正量とします。ヒストグラムフィルタとは、推定したい変数の状態空間、例えばHawkeyeでは自己位置のx座標とy座標のGNSS/INSとの差を、グリッド状に区切り、それぞれの領域にいる尤もらしさを計算することで、状態の確率分布、そして状態を推定する手法のことです。結果画像をそのままヒストグラムとみなしても安定しないので、ヒストグラムと補正量の2段階で累積させることで位置推定を安定化しています。
参考論文ではヒストグラム領域の中心はGNSS/INSの推定位置で固定になっていますが、Hawkeyeではヒストグラムの分布が画像端に寄ってしまう可能性を考慮して、分布が中央から一定以上離れたらヒストグラム領域をずらして一定以上端に寄らないように調整できるようにしています。
まとめ
LiDARと路面反射強度地図を使った自己位置推定を実装しました。ミリ波レーダを使用していない分、精度が低下すると考えられますが、今回実装・公開した位置推定手法が地図作成及び位置推定技術の開発に役立つと幸いです。今後は、地図やGNSS/INSの入力形式の制限を改善したり、テンプレートマッチングの結果画像に現れる線や縞を自己位置推定に利用できるようにしたり、簡略化した地面点群抽出を組み込んだりすることを計画しています。
最後にマップフォーでは、一緒に地図作成・位置推定技術を開発していくチャレンジャーを募集しています。
カジュアル面談も大歓迎ですので、ぜひご連絡ください。
▶︎▶︎キャリアページはこちら
参考文献
[1] D Hirano, K Yoneda, R Yanase, A Mohammad, N Suganuma, “LiDAR and Radar Sensor Fusion for Localizing Autonomous Vehicles”, Transactions of Society of Automotive Engineers of Japan 51(5) 824–829, 2020
https://doi.org/10.11351/jsaeronbun.51.824