SEAMSについて
SEAMS(シームス、Small, Easy and All-around Mapping System)は、3次元空間情報を収集する3次元マッピング用のデータ計測システムです。点群作成処理に必要となる複数のセンサーを搭載しています。技術的な知識がなくても簡単に、屋内外問わず広域のデータ計測ができます。
SEAMSには、ウェアラブルモデル ME、車載モデル LX の2つのモデルがあります。計測対象となる環境条件に合わせ、最適なモデルをご提案します。

ウェアラブルモデル ME

車載モデル LX
3次元データ計測システムの活用例
歩行計測例

市街地の公共測量、工場内の設備点検や自律移動ロボットのための地図作成
車両計測例

カーナビ用・自動運転用の地図作成、トンネルや送配電設備の保全
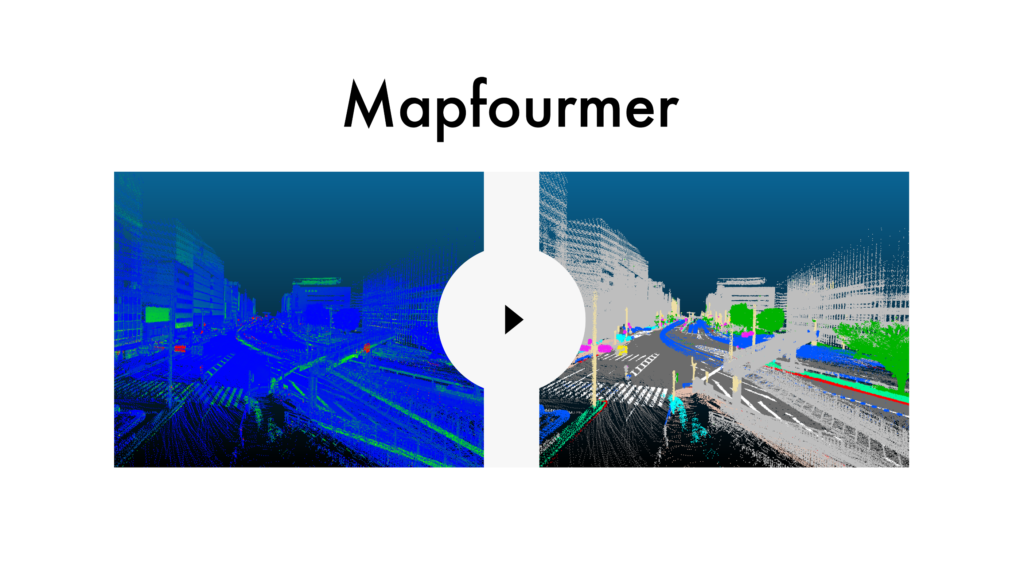
3次元点群作成とその後の処理プロセス
3次元点群を作成するためには、3次元点群作成ソフトウェアが必要です。
マップフォーの3次元点群作成システム「MAP IV Engine」はSEAMSとシームレスに連携することができます。

3次元データ計測システムで、実世界のセンサーデータ(点群データ)を計測します。
(併用することで、MAP IV Engineの機能をフルで活かすことができます)

特徴
高いコストパフォーマンス
MAP IV Engineと併用することで、MMSと同等な精度の3次元地図作成が可能です。地図情報レベル250(水平位置標準偏差0.12m以内)の精度に準拠しています。
※センサー構成・使用するシステムなどの条件によります。

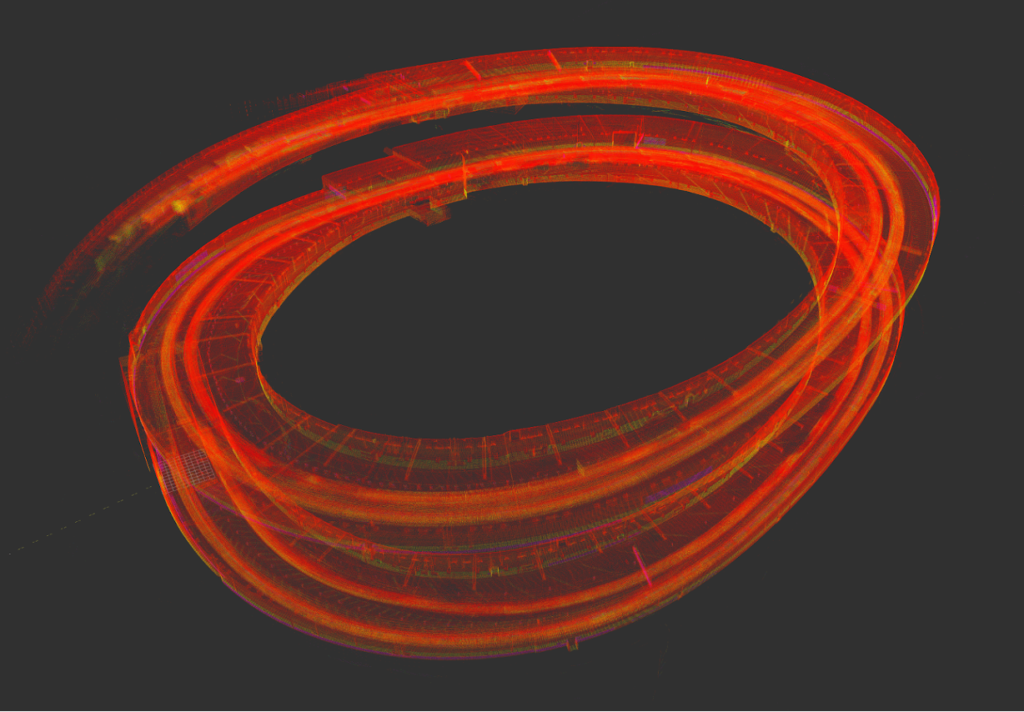
計測環境を問わない高いロバスト性
GNSS 、IMU、車速センサーを統合することで、従来のSLAMでは、精度が著しく低下する箇所においても、高精度に3次元地図を作成できます。例えば、3次元的特徴が限られた平原などの開けた場所や、トンネル・階段などの連続的な地形を含む場所においても、正確にマッチングすることが可能です。
計測効率を向上させる処理スピード
SEAMSは、従来のTLSやMMSを用いた計測作業と比べて高速処理が可能です。
計測を大幅に効率化し、改善します。
※センサー構成・使用するシステムなどの条件によります。
SEAMS バックパック型 vs TLS
➡ ︎測量作業工数を44%削減
SEAMS 車両搭載型 vs MMS
➡ 計測作業時間を74%削減
直感的に使えるUXデザイン
専用のコントローラが不要で、お手持ちのスマートフォンやタブレットと接続し、簡単に計測操作ができます。
GNSSの受信状況やカメラ映像もリアルタイムに確認できます。

ハードの強み
- コンパクトで、可搬性に優れています。専用のケースに収納して、宅配便での配送も可能です。
- 起動後、簡単なキャリブレーション操作を行うだけで、環境を選ばず、誰でも、時間をかけずに安定した精度でデータ計測が可能です。
- 車載モデルは、市販のルーフキャリアに設置できるため、車種を選ばず搭載が可能。360°カメラの搭載にも対応しています。

※精度や処理時間については、周辺環境や処理に利用するソフトウェアなどの条件により異なります。詳しくはお問い合わせください。
※一部車種およびルーフキャリアの形状によっては、取り付けできない場合がございます。事前にご相談ください。
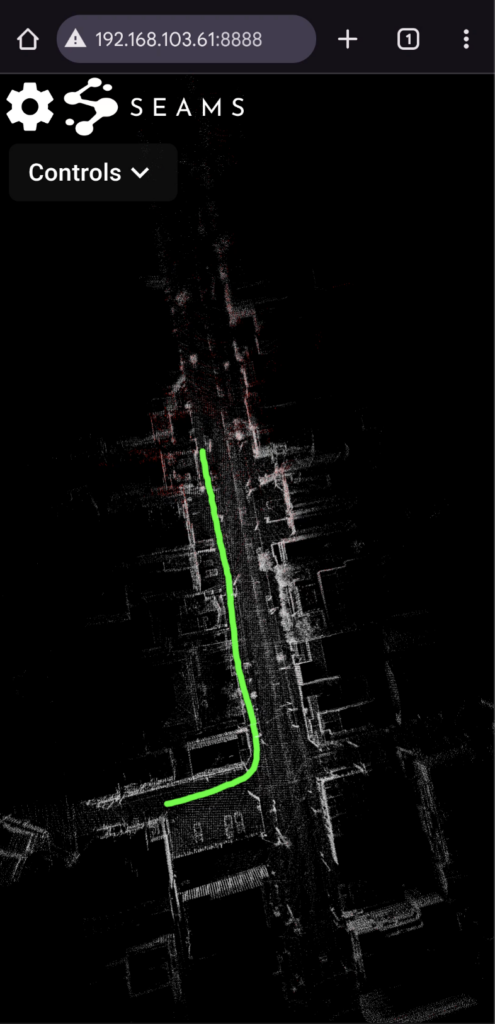
現場で即時確認が可能なリアルタイムマッピング
計測中の点群データをスマートフォン上にリアルタイムに表示します。PCへのデータ転送を待つことなく、現場で即時に計測状況を確認できます。
カスタムメイドモデル
上記 2つの規格モデルに加え、特定の計測環境やご要望に応じたセンサー構成のカスタムメイドモデルをご用意することも可能です。
車両への組み込み、ロボットへの搭載や手持ちでの利用など、用途に合わせて最適な構成にカスタマイズできます。まずはお気軽にご相談ください。

簡易設置型 車載モデル例
サポート体制
テクニカルサポート
ライセンス期間中は、ソフトウェア利用に関するテクニカルサポートが受けられます。
 " alt="">
" alt="">
 " alt="">
" alt="">