MAP IV Engineについて
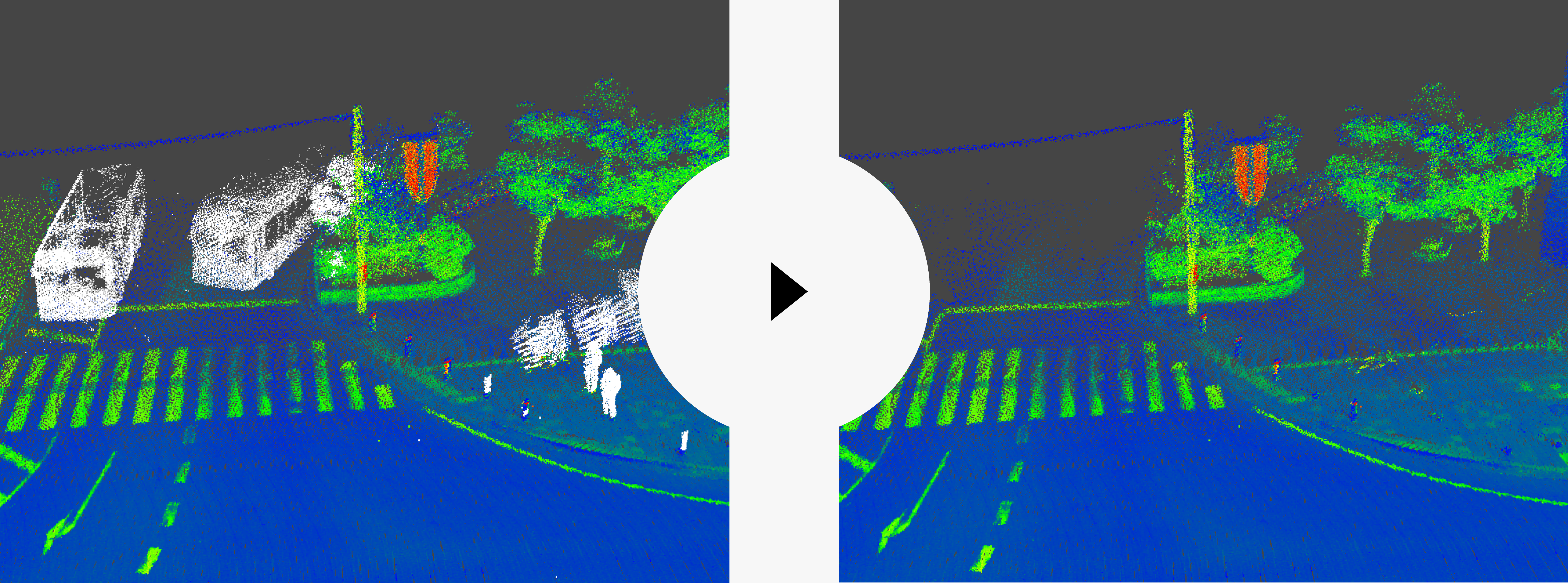
マップフォー独自のSLAMアルゴリズムを使用した3次元点群作成ソフトウェアです。
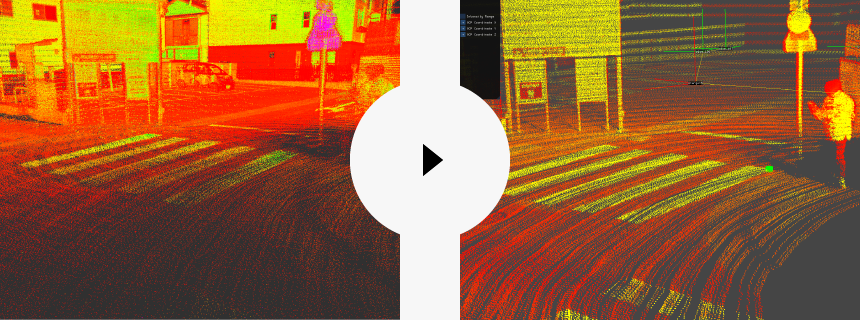
3D LiDARで計測されたデータを解析して、実世界の形状や物体を3次元点群としてデータ化します。
RTK-GNSSやIMUを複合することにより、公共測量にも活用できます。
3次元点群は、様々なアプリケーションに活用される3次元データを作成するための重要な基礎データです。点群をメッシュ化や3Dモデル化することで、自動運転や都市計画などに活用できる3次元データへ変換できます。
3次元点群の活用例
3次元点群は、実世界の形状を高精度に再現できるため、さまざまな分野で活用されています。

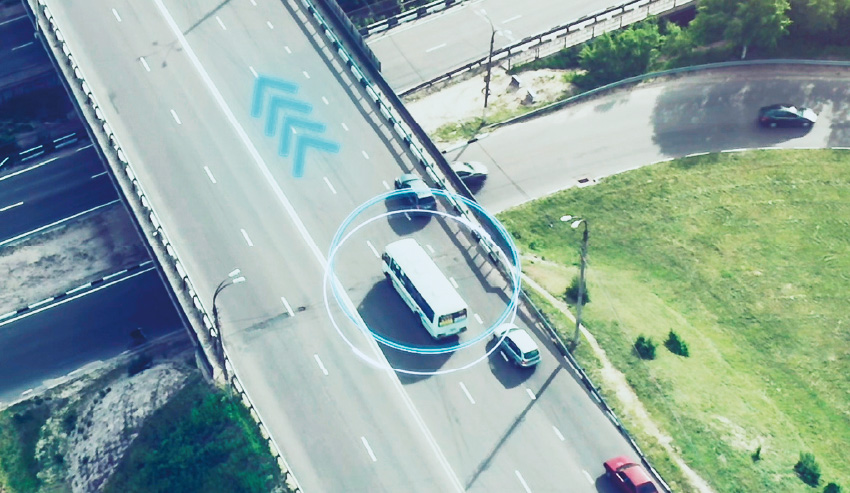
自動運転・産業ロボティクス
道路や工場・オフィスなどあらゆる環境で正確かつ安全な自律移動を実現するために、高精度な自己位置推定、環境認識、行動計画に活用されます。

スマートシティ・都市計画
スマートシティの実現に向け、3次元空間のデジタル基盤として活用されています。

建築・土木・建設現場
工事前後の地形や構造物を高精度に記録し、工事の進捗状況や変化をより正確に管理するために活用されています。

インフラ・設備保全
道路、トンネル、鉄道、送配電線などの社会インフラや、工場内の配管や貯蔵タンクなどの設備モニタリングに活用されます。

拡張現実(AR) / 仮想現実(VR)
3次元点群をXRアプリケーション内に組み込むことで、現実世界と連動したコンテンツによる没入感ある体験を提供できます。
3次元点群作成とその後の処理プロセス
3次元点群を作成するためには、センサーデータを取得し、解析する必要があります。

3次元データ計測システムで、実世界のセンサーデータ(点群データ)を計測します。
(併用することで、MAP IV Engineの機能をフルで活かすことができます)

特徴
高いコストパフォーマンス
安価な計測システムを使用しても、MMSと同等の精度で3次元点群を作成できます。作成される点群は、地図情報レベル250(水平位置標準偏差0.12m以内)の精度に準拠しています。
※センサー構成・使用するシステムなどの条件によります。

計測環境を問わない高いロバスト性
GNSS 、IMU、車速センサーを統合することで、従来のSLAMでは精度が著しく低下する場所でも、高精度な3次元点群を作成できます。例えば、特徴が少ない平原などの開けた場所や、トンネル・階段などの連続的な地形でも、正確にマッチングが可能です。
点群の高速処理
マルチスレッドとGPUを用いた並列計算により、計測時間とほぼ同じ時間で点群処理を高速に実行できます。
直感的に使えるUI
専門知識がなくても、効率的に操作でき、3次元点群を簡単に自動で作成できます。

計測方法を選ばず使える
車両、バックパック、ドローンなど、さまざまな計測方法に対応しており、計測された物理空間データを活用できます。

提供形態
ライセンス契約
オンプレミスによる年間ライセンスで提供します。
トライアルも承っておりますので、ぜひ一度お問い合わせください。
サポート体制
テクニカルサポート
ライセンス期間中は、ソフトウェアの使用に関するテクニカルサポートが受けられます。


 " alt="">
" alt="">
 " alt="">
" alt="">
 " alt="">
" alt="">