Atomic Engineについて
環境認識技術は、高精度なセンサー技術と高度なデータ処理アルゴリズムを組み合わせることで、周囲の物理的な環境を自動で検出し、利活用可能なデータを抽出する技術です。
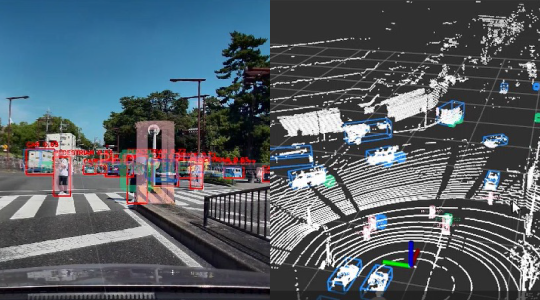
Atomic Engineは、LiDAR、カメラ、レーダーなどのセンサーから得られた情報をもとに、実世界の対象物を正確に認識するリアルタイム環境認識ソフトウェアです。
対象物のクラス、位置関係、速度などをリアルタイムに出力する高精度な認識モデルを提供します。
環境認識技術の活用例
スマートシティと自動運転
例:駅前や公園など公共空間での人流調査・交通量調査、自動運転における障害物検知・死角検知
現場のモニタリングと保全
例:工場や建設現場でのリアルタイムモニタリング、現場作業に活用可能なデータの収集
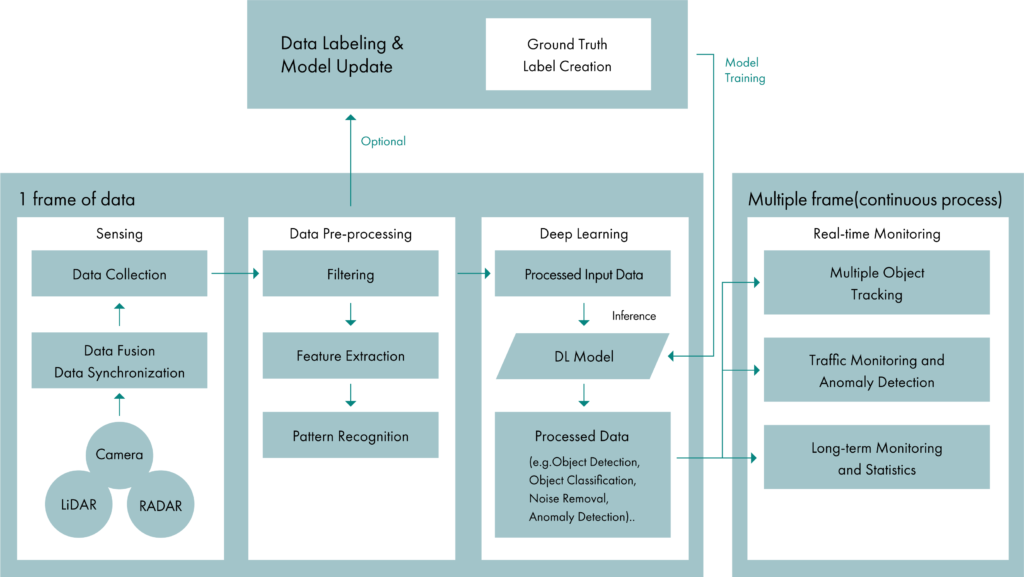
センサーデータが実用的な情報になるまで
周囲の環境から収集したセンサーデータには、人間が一見しただけでは分からない膨大な情報が含まれています。
マップフォーが開発した独自のアルゴリズムを用いることで、センサーデータから次のような情報を取得できるようになります。
対象物の検出・識別・移動速度・予測経路・トラッキング・数量・サイズ・位置、固定物と移動物の判別
アノテーションオプション
ご要望に合わせて、データのクラス分類やラベリングなど、信頼性の高いアノテーション作業の請負も可能です。
Atomic Engineの特徴
固定型と移動型、両方の環境認識に使用可能
スマートポールのように固定設置による環境監視と、車両などの移動体による環境認識の両方に対応しています。

多様なセンサー機種をサポート
LiDARをはじめ、RGBカメラ、赤外線カメラ、レーダーなど、多種多様なメーカーのセンサーに対応しています。
マルチセンサーフュージョン対応
複数のセンサーから取得した情報を統合し、より高い精度・ロバスト性で認識処理を行います。
カメラ、LiDAR、レーダーなど異種センサーの組み合わせにも適用可能です。
高いトラッキング性能
手前にある物体により対象物が遮蔽され、一時的に見えなくなった場合でも、再び同じ対象物を検出した際、同一物体として認識されます。
高精度3次元地図との複合により、さらなる精度向上が期待できます。
機能
- 3次元地図とセンサー情報の統合
- 複数のセンサーからの情報統合(センサーフュージョン)
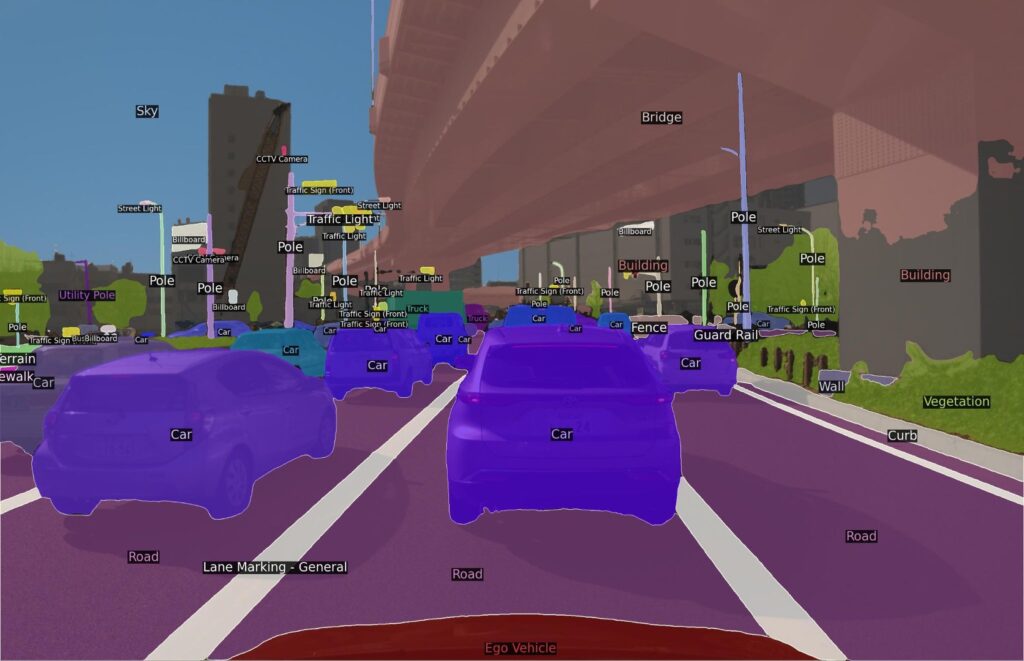
- オブジェクトの検出とトラッキング
- 車両・歩行者などの移動体や地物の認識(2次元/3次元)
- 信号認識
- ヒートマップ生成
- 認識結果出力
サポート体制
Atomic Engineは非常に柔軟性の高い環境認識ソフトウェアで、使用環境やアプリケーションに合わせてカスタマイズできます。マップフォーには、センサーキャリブレーションに対応する専門エンジニアや、学習用データセットを素早く作成できるラベリングチームがあり、カスタマイズのご要望にもお応えします。
社内に導入ノウハウがない場合でも、お気軽にご相談ください。