About Eagleye
Eagleye* is a multi-sensor fusion navigation system designed for vehicles. It utilizes a combination of sensors including GNSS (Global Navigation Satellite System), IMU (Inertial Measurement Unit) and vehicle speed sensors to reliably provide highly accurate position and orientation estimation, even in challenging environments for GNSS where multipath often occurs.
*Eagle Eye is a joint development between MAP IV, Inc. and Meijo University Meguro Research Lab. The source code is publicly available as an Open Source Software (OSS) at https://github.com/MapIV/eagleye.
MAP IV, as a committed member of the Autoware Foundation, supported Eagleye’s integration into the world’s leading open-source autonomous driving software “Autoware”*.(https://autoware.org/autoware-overview/)
Multi-sensor fusion navigation system?
A multi-sensor fusion navigation system is a sophisticated technology that utilizes Inertial Navigation Systems (INS) and various sensors and technologies, including GNSS, to compute highly accurate position information that cannot be achieved by a single sensor alone. Integrating multiple types of sensors compensates for the inherent measurement errors that might arise in challenging operating conditions for each sensor.
By leveraging multi-sensor data, the system effectively increases the accuracy, robustness, and reliability of the navigation solution, making it a compelling choice for many business and academic applications where precise positioning is critical.
Applications of Multi-sensor Fusion Navigation System
Multi-sensor fusion navigation systems are used in mobile platforms where accurate position estimation is required in a variety of conditions.
Here are some illustrative examples:

Navigation of Autonomous Vehicles in Tunnels

Localization for Autonomous Mobile Robots in Manufacturing Plants

Localization Monitoring for Construction and Mining Machinery
Key Features
Cost-Effective High Performance
In high-precision positioning systems, satellite-based solutions are widely relied upon. Nevertheless, they can also be prohibitively expensive due to the need for costly GNSS and IMUs comprised of accelerometers and gyroscopes. However, Eagleye has developed a cost-effective alternative by leveraging relatively inexpensive GNSS receivers, IMUs, and our proprietary fusion algorithm to deliver accurate positioning capabilities. This approach allows us to provide a cost-effective solution for businesses and organizations seeking reliable high-precision positioning.

Support for a wide range of sensor models
Eagleye can handle a wide range of GNSS and IMU sensor models. The system can acquire vehicle speed from multiple sources, such as OBD-II CAN signals, vehicle speed odometry, and data from laser Doppler speed sensors.
Stable, High-Precision Position Estimation Performance
Eagleye can deliver a position estimation accuracy of 0.5 meters or less per 100 meters for relative positioning, even in areas where RTK (Real-Time Kinematic) support is unavailable.
Furthermore, the accuracy of absolute positioning in urban areas is 1.5 meters, which enables lane distinction. Even in challenging environments with weak signal reception, such as urban centers and tunnels, maintaining high position estimation accuracy is feasible with the following methods, depending on the measurement conditions.
① GNSS and RTK Positioning Combination
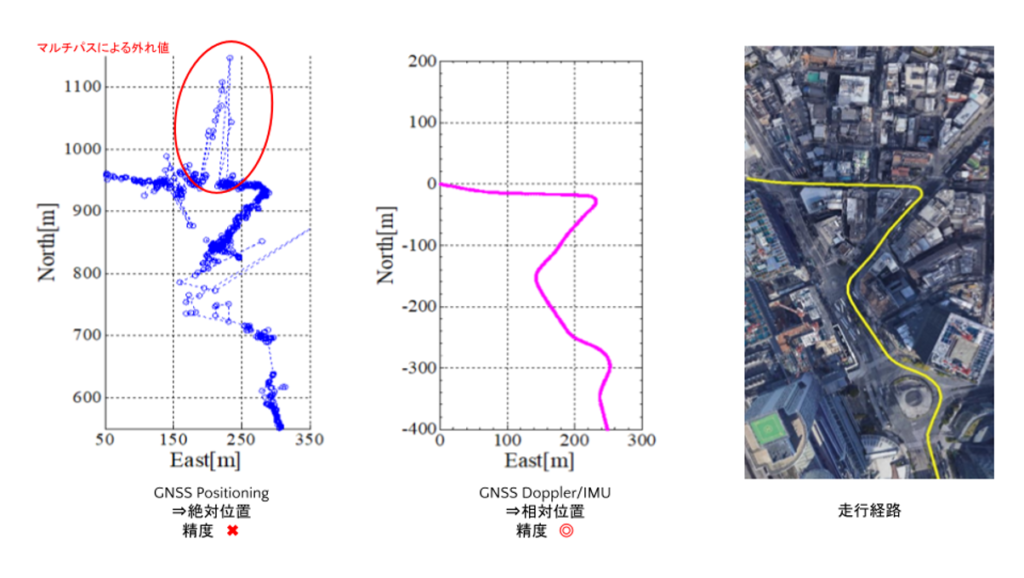
An enhanced estimated localization position can be achieved by integrating GNSS absolute position data with GNSS Doppler/IMU relative position estimations and eliminating outliers that may arise due to multipath interference.
The process involves fusing the GNSS data with the Doppler/IMU data to obtain a more precise and reliable position estimate. In addition, eliminating outliers caused by multipath interference further improves the accuracy of the final position estimate. This approach offers a robust and effective solution for obtaining accurate position estimations in various business and academic settings.
② Utilizing GNSS Doppler Velocity
Accurate position estimation requires the correction of errors in vehicle speed and IMU sensors, utilizing the measured GNSS Doppler velocity. The process ensures precision in location determination by considering the discrepancies that may arise from the earlier factors. This method is a crucial aspect of navigation technology and is widely used in various industries, including but not limited to transportation and logistics, geospatial mapping, and surveying.
About Eagleye ECU
MAP IV offers Eagleye ECU kits with all the sensors required to enable the open-source Eagleye GNSS/IMU fusion navigation system’s smooth functioning. Our kits can process position estimation results and are an all-around solution for GNSS, IMU, and CAN data acquisition requirements and position and orientation estimation with Eagleye.

Support System
MAP IV has a team of experts to help and provide solutions tailored to specific user environments and applications.