TECHNOLOGY 02MAPPING
The technology of utilizing sensors to generate real-world 3D map data is crucial for the development of autonomous driving systems and robotics.
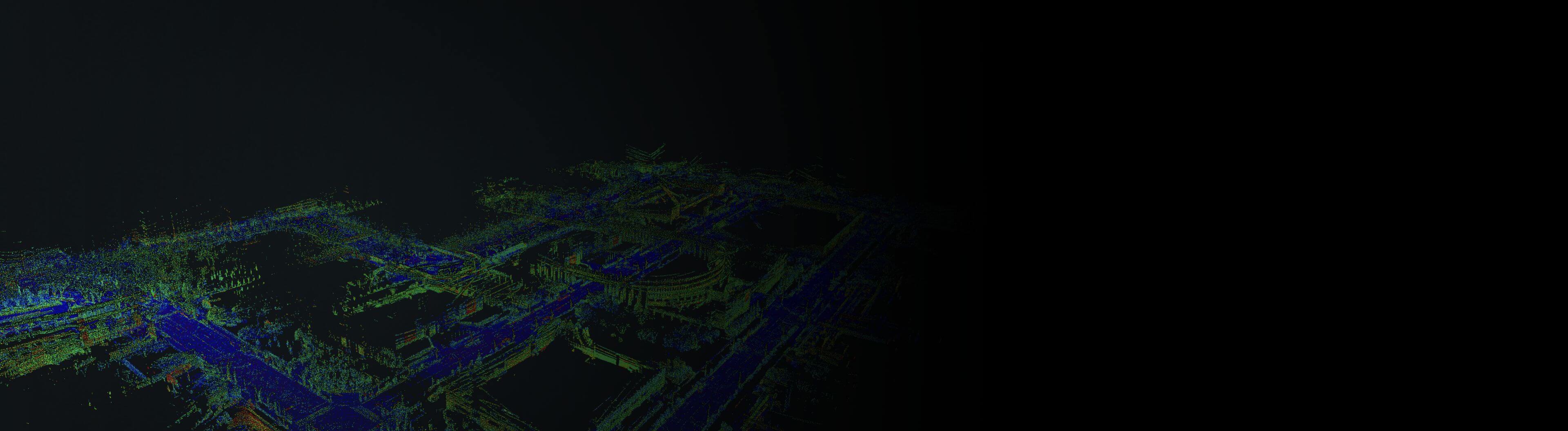
- LiDAR SLAM is the leading mapping technique among these technologies.
SLAM (Simultaneous Localization and Mapping) is a technology that enables robots or vehicles to determine their own position and orientation (pose estimation) in a dynamic environment, while simultaneously creating a map of that environment in real-time. -
MAP IV’s LiDAR SLAM technology has attracted industry attention for its outstanding features, which include:
- High-speed data processing via GPU-based scan matching.
- Generation of sharp 3D point clouds through LiDAR scan distortion correction.
- Sensor fusion technologies that enhance relative and absolute positioning accuracy by combining IMU, GNSS and wheel encoder data.
- We can create highly accurate maps using our SLAM technology thanks to these technological advancements. Previously, this was only possible through expensive and specialized surveying equipment. Additionally, our technology adheres to public surveying standards, making it valuable in various industries and sectors.With the help of third parties, we have quantitatively evaluated that our SLAM mapping accuracy is commercial-grade.
-
At MAP IV, we have developed and advanced two distinct positioning technologies for various applications:
- Scan Matching compares real-time LiDAR data with pre-existing, high-fidelity 3D maps, which are generated using sophisticated mapping techniques.
Our maps and localization algorithms enable unparalleled precision in positioning, with a level of accuracy that measures down to the centimeter. This feature is particularly advantageous in complex road environments and crowded urban areas, and it is utilized in high-precision control for autonomous driving and self-driving robots. - GNSS/IMU Integrated Navigation:
We have developed sensor data correction techniques in collaboration with various universities. Our GNSS and IMU integrated navigation system uses vehicle speed information to estimate position and orientation. This technology allows for high-precision positioning that was once only possible with expensive sensors but can now be achieved using cost-effective ones. When paired with 3D LiDAR technology, it provides even higher accuracy and reliable positioning in challenging environments where conventional positioning methods fall short.
- Scan Matching compares real-time LiDAR data with pre-existing, high-fidelity 3D maps, which are generated using sophisticated mapping techniques.
LOCALIZATION
Localization is a technology that uses information
gathered from sensors and map data to accurately estimate self-position.