About SEAMS
We specifically engineered SEAMS to gather all the necessary data to generate accurate 3D point cloud maps. We equipped SEAMS with various sensors, including LIDAR, camera, and IMU. Furthermore, we ensure that all the sensors are synchronized and that the data provides all the necessary real-time diagnostics to ensure a proper collection.
Our SEAMS system is available in three models: Backpack, Handheld, and Vehicle-mounted. Depending on the specific environmental requirements and use cases, we can recommend the model that best suits your needs. The carry-on version of SEAMS uses interchangeable batteries, allowing the system to extend its measurements to cover extensive environments.
We are confident that our SEAMS system will provide you with the data accuracy and reliability needed to carry out your work. Our team of experts is always available to provide you with professional advice and answer any questions you may have regarding our system.

Backpack

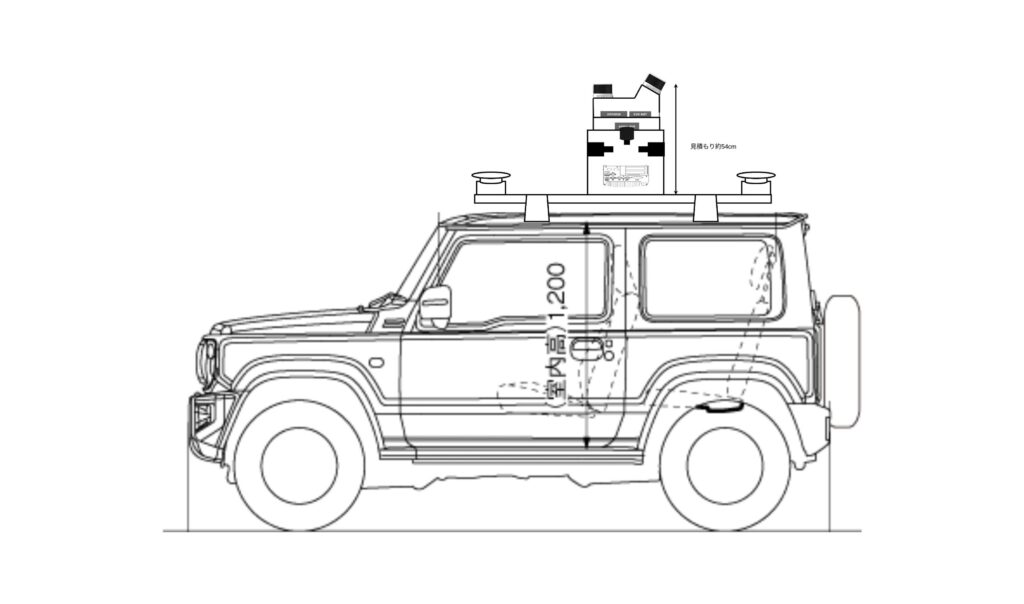
Vehicle-mounted

Handheld
Examples of 3D Mapping System Applications
Backpack measurement: Surveying and robotics

Conducting public surveys in urban areas, generating maps for factory robots.
Vehicle measurement:
Road mapping and infrastructure maintenance

Creating maps for car navigation and autonomous driving, maintenance of tunnels and power distribution facilities.
Handheld measurement:
Indoor mapping and infrastructure inspection

Inspecting factory components, including pipes and storage tanks.
The Process of 3D Map Creation
Creating a 3D map requires the collection and processing of sensor data. For this data acquisition, we recommend our product, the 3D Mapping System ‘SEAMS’.
3D Point Cloud Mapping Software ‘MAP IV Engine’
The SEAMS data is fully compatible with our proprietary 3D mapping software, MAP IV Engine. Furthermore, all SEAMS sensors are precalibrated and synchronized, resulting in a reduced time requirement for generating 3D maps. This ensures a streamlined workflow and improved efficiency, making it an ideal solution for businesses and academic institutions seeking to optimize their mapping capabilities.
3D Data Measurement System ‘SEAMS’

Equipped with 3D LiDAR, GNSS, IMU and cameras, ‘SEAMS” reliably captures the essential real-world sensor data for 3D map generation.
3D Point Cloud Mapping Software ‘MAP IV Engine’

By processing the collected sensor data, it accurately converts real-world environments into 3D point cloud data.
Key Features
Competitive Cost-Performance
Pairing SEAMS with the MAP IV Engine enables the creation of 3D maps comparable to MMS (Mobile Mapping System) in terms of accuracy but at a fraction of the cost. It can produce maps that are compliant with the Map Information Level 250 standards (with a horizontal position standard deviation of 0.12m or less).
*The system’s accuracy may vary depending on sensor configuration and system operating conditions.

High Robustness Across Various Environments
With the integration of GNSS, IMU, and vehicle speed sensors, it is possible to create highly accurate 3D point cloud maps, even in challenging scenarios where traditional SLAM systems would often degrade or fail. This includes featureless open areas and places with monotonous landscapes such as tunnels and staircases.

Enhanced Measurement Efficiency with Improved Processing Speed
SEAMS offers faster processing speeds compared to traditional approaches based on Total Station (TLS) and MMS, leading to significant improvements in measurement efficiency.
Public Survey Work:
Using the SEAMS Backpack leads to a 44% reduction in survey time compared to TLS
3D Road Mapping:
Using SEAMS LX instead of MMS results in 74% reduction in measurement duration
UX Design
No dedicated controller needed. Simply use your smartphone or tablet to operate the measurements. Additionally, you can monitor GNSS reception status and view real-time camera images.
Key Hardware Advantages
- Portability: Designed for easy transport.
- Lightweight: Ensures easy and smooth operations.
- Easy-to-Use: Backpack type does not require calibration during measurement. Measurement can begin within a few minutes of starting up the unit.
- 360° Camera Support: Vehicle-mounted enables rich visual data capture. And can be mounted on standard roof carriers, ensuring compatibility with a variety of vehicle models.
※Accuracy and processing duration may vary depending on factors such as the surrounding environment and software used for processing. Please contact us for further details.
Support System
Technical Support
Throughout the license duration, we provide technical support for software usage.
Hardware Bundle Discount
Benefit from a bundle discount when purchasing both the MAP IV Engine and SEAMS.