Mapping Data Measurement and Creation Services
MAP IV specializes in the development of “Dimensional intelligence” technology.
With years of experience and cutting-edge technology, we provide tailored 3D map data solutions to different industries. We aim to deliver high-quality 3D map data that meets our customers’ unique requirements.
Leveraging our expertise in creating 3D maps for autonomous driving applications, we offer a comprehensive range of 3D map data creation services. Our services help our clients achieve their objectives and maximize the potential of their projects. Our experts are dedicated to delivering exceptional results and ensuring our clients receive the highest level of service.
Some of the data production services we provide are
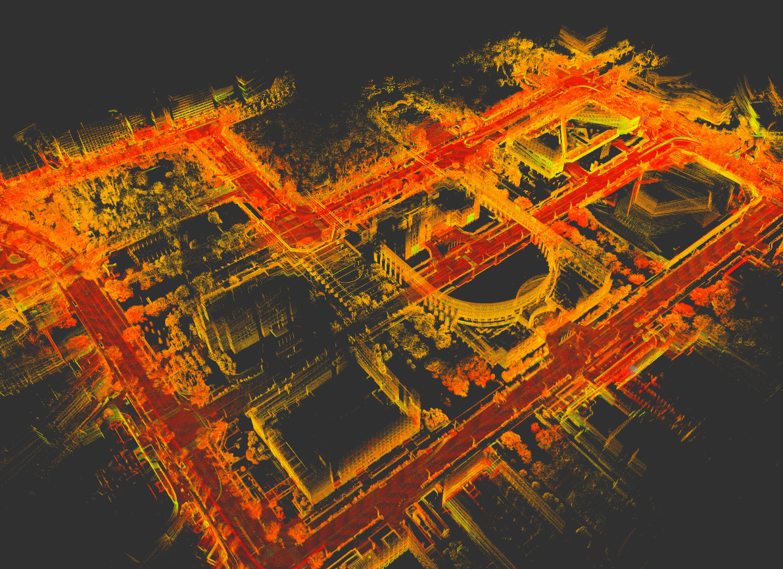
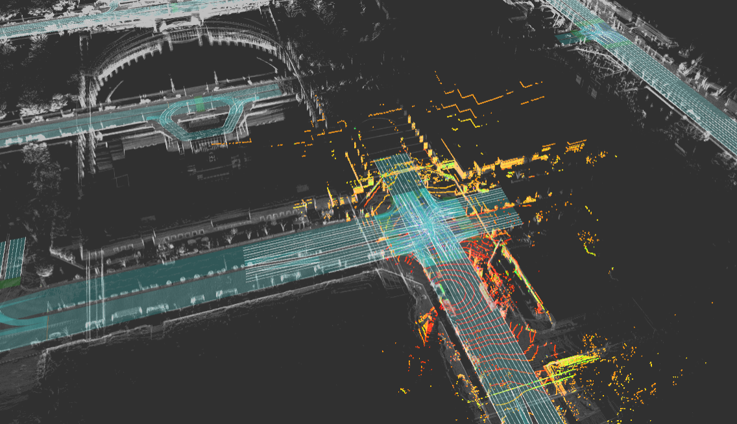
- Point cloud noise removal :
The process of mapping involves the accumulation of 3D scans over time. These scans often contain undesired objects such as pedestrians, static or dynamic vehicles, or other objects considered noise. Such noise can negatively impact the quality of the map. To address this issue, our team has developed extensive knowledge and experience in identifying and removing objects from the scan data. In addition, we utilize advanced techniques to fill in missing parts of the map, resulting in a clean and accurate point cloud. Our commitment to delivering high-quality data ensures our clients receive the most reliable and precise mapping services.
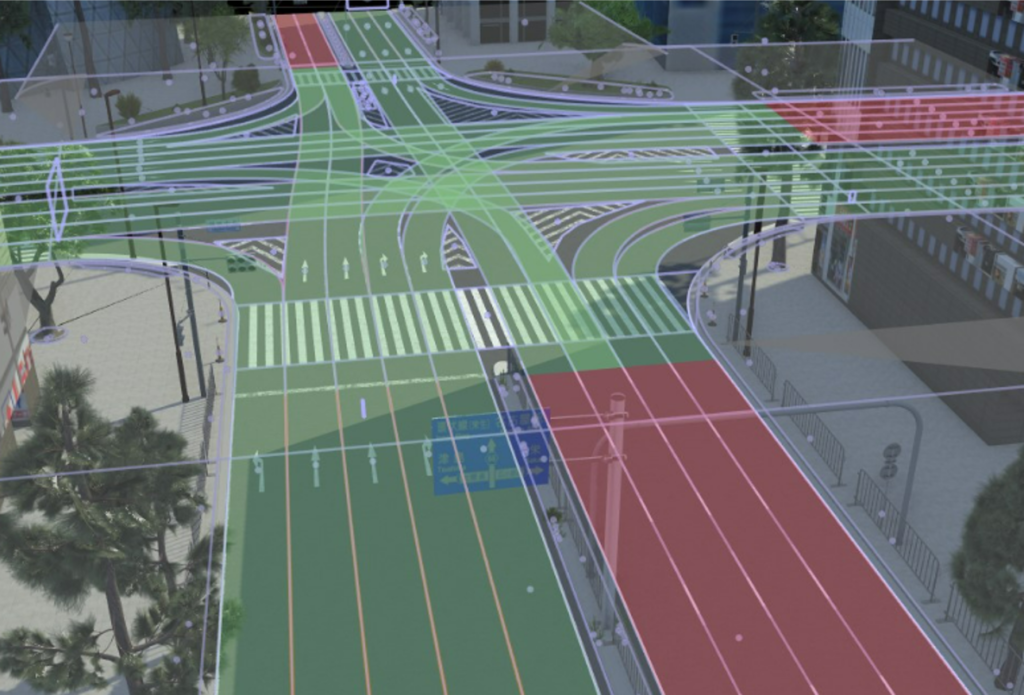
- Generation of HD maps :
Effective navigation for autonomous robots necessitates self-localizing within a map and estimating the optimal path to reach a predetermined destination. Point Cloud maps are an excellent geometric data source that accurately reflects the real world. However, these maps lack topological information, requiring additional data regarding critical locations and viable paths. On the other hand, HD Maps provide detailed information about available lanes, paths, traffic lights, and traffic regulations. Our team has extensive experience developing these maps based on industry-standard practices, enabling the deployment of safer autonomous robots.
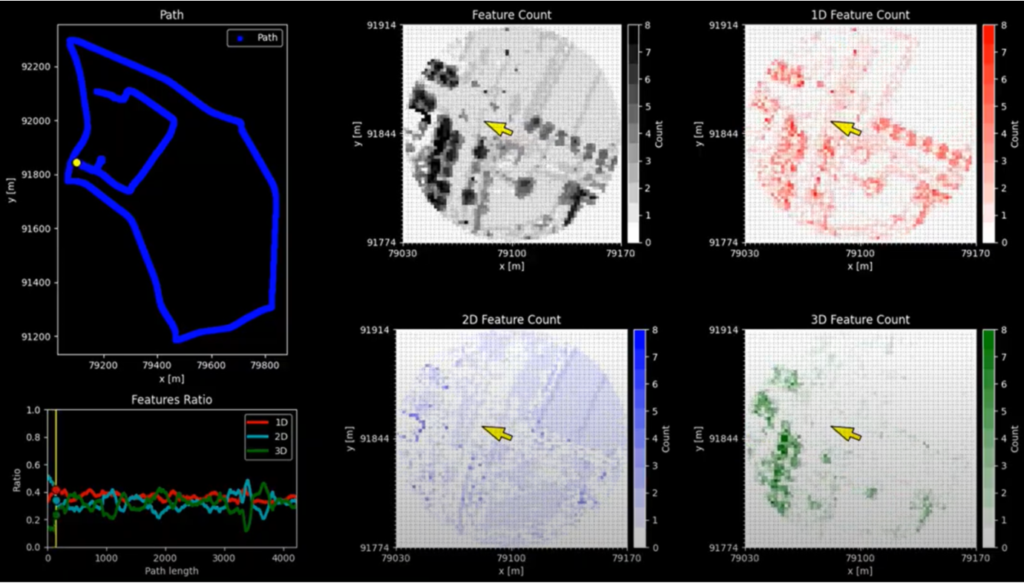
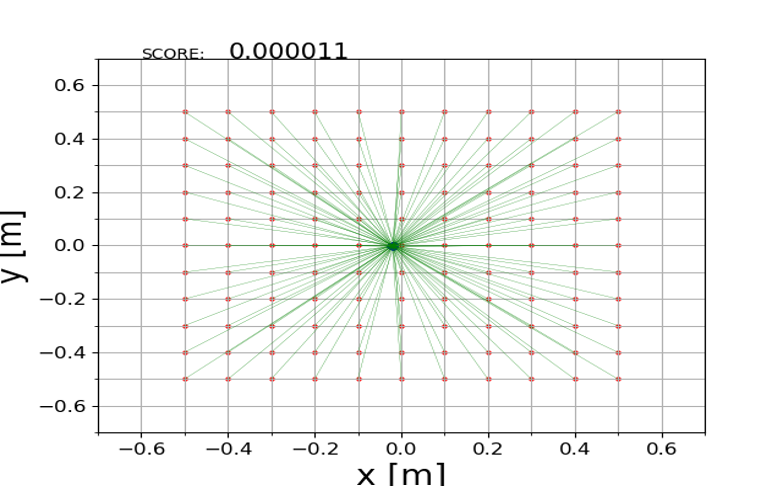
- Localization evaluation :
The process of self-localization with the help of a map and an autonomous robot equipped with sensors is a complex task. Various factors can contribute to inaccuracies in self-positioning on the map, resulting in reduced mapping efficiency. Our organization provides objective and quantifiable localization evaluation services that continuously assess the localization algorithms under different scenarios. These assessments are based on rigorous testing procedures and help to identify potential shortcomings in the algorithms, enabling us to provide practical solutions to clients. Our expertise in localization evaluation ensures that our clients’ mapping results are reliable and accurate.
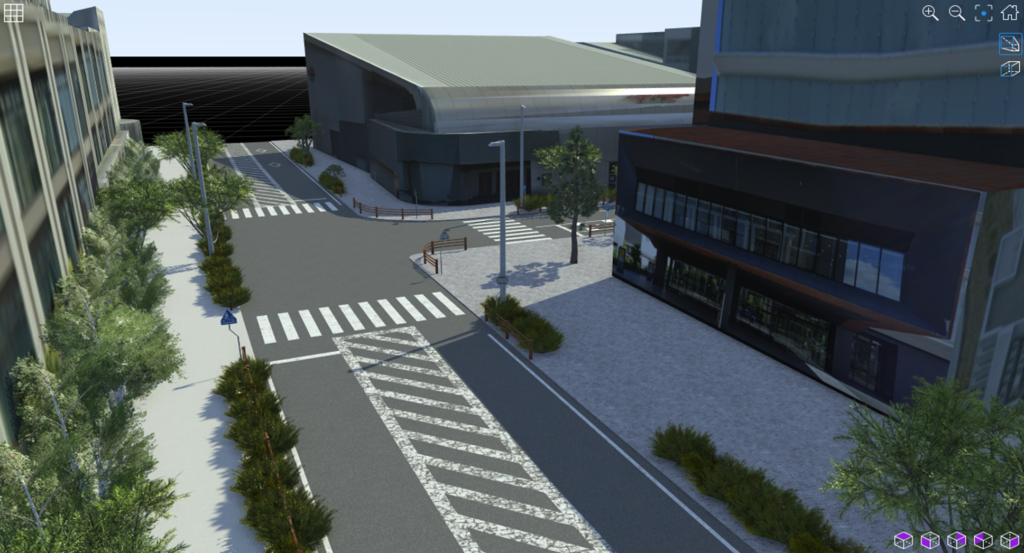
- 3D model creation :
In specific applications, it is imperative to have precise and accurate simulations of scenarios for autonomous robots. However, these simulations require a “digital twin” – an exact 3D model representation of the scenario. MAP IV can generate highly accurate 3D models with the help of point cloud maps.
We are your all-in-one solution provider, offering world-class services to cater to your geospatial requirements.
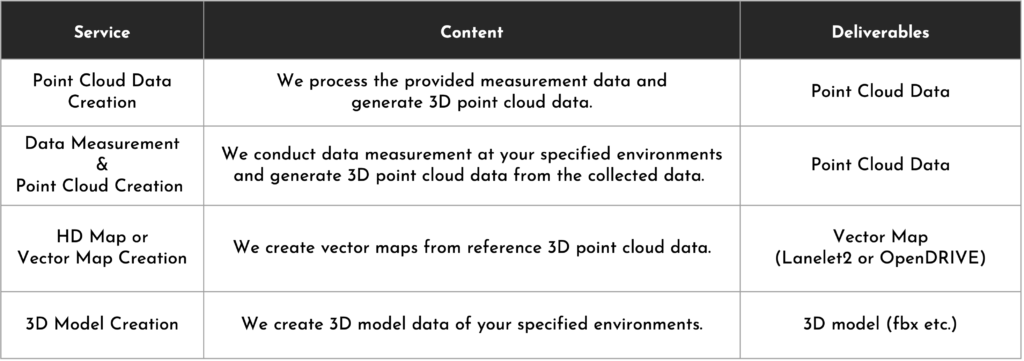
Service Menu
We tailor service combinations to your specific needs and offer customized recommendations.
We can also offer localization evaluation and planning simulation testing using ‘Autoware*’ when your target application of the 3D map is autonomous driving.
※Autoware” is an open-source autonomous vehicle software based on the Robot Operating System (ROS). It includes all the functionalities required for autonomous driving, including vehicle localization, object detection, path planning, and control. It was created to foster open innovation in autonomous driving technology, allowing more individuals and organizations to contribute.
※”Autoware” is a registered trademark of The Autoware Foundation.
Primary Systems Used:
A data measurement system designed for 3D mapping, designed to collect required 3D spatial information.
A proprietary 3D mapping software developed by MAP IV that uses advanced algorithms and SLAM technology for creating 3D point cloud maps.
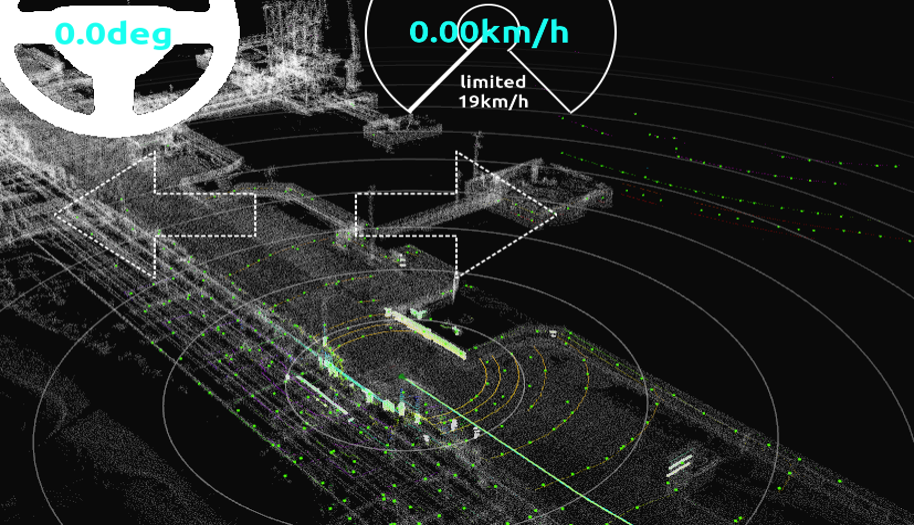
USECASE
Our High-Definition (HD) 3D maps have been specifically designed for autonomous driving systems.
The HD 3D maps offer superior quality and can be a reliable foundation for advanced autonomous driving systems. With their exceptional accuracy, these maps can facilitate the development of safer, more efficient transportation solutions. These maps are engineered to meet the industry’s highest accuracy requirements, and they deliver precision down to 5cm, making them suitable for other applications such as:
- Autonomous Driving: Urban areas, highways, airports, warehouses, factories, driving schools, etc.
- Autonomous Mobile Robots: Office environments, urban areas, parks, forests, etc.
- Infrastructure and Facility Inspection: City utility lines, power poles, railway infrastructure, factories, etc.
- Augmented Reality/Virtual Reality: Urban areas, university campuses, etc.
For inquiries, quotes, or other discussions, please contact us using our inquiry form.