About MAP IV Engine
MAP IV Engine is an advanced 3D point cloud mapping software that employs our proprietary SLAM (Simultaneous Localization and Mapping) algorithm. This software can create highly accurate and realistic real-world representations in the form of 3D point clouds using data collected from 3D LiDAR sensors. In addition, we designed MAP IV Engine to integrate and combine data from RTK-GNSS and IMU technologies to aid in public surveying efforts. With its cutting-edge capabilities, MAP IV Engine offers a valuable tool for businesses and academic researchers looking to create detailed and accurate 3D maps of real-world environments.
Applications of 3D Point Cloud Maps
3D point cloud maps are used in a wide range of applications due to their superior ability to represent real-world shapes compared to traditional 2D maps. Here are some notable uses:

Autonomous Driving and Industrial Robotics
Used for high-precision self-positioning, environmental sensing and motion planning. 3D point cloud maps enable reliable autonomous mobility in diverse environments such as roads, factories and offices.

Smart Cities and Urban Planning
Used as a digital foundation for 3D environments, helping smart cities realize more complex objectives.

Architecture and Civil Engineering
Manage pre- and post-construction surveys and track construction progress using 3D point clouds.

Infrastructure and Asset Maintenance
Used to monitor public infrastructure such as roads, tunnels, railways, power lines and industrial facilities such as pipelines and storage tanks.

Augmented Reality (AR) and Virtual Reality (VR)
Incorporating 3D maps into Extended Reality (XR) applications elevates the user experience, delivering interactive content that resonates with the real world.
3D Point Cloud Generation and Post-Processing Workflow
Creating 3D point cloud maps begins using a data collection system mounted with environment sensing devices to capture the desired area to be mapped. The data is then analyzed to identify the shape and structure of real-world environments as seen by each sensor, and finally cleaned up to remove undesired artifacts such as moving objects.
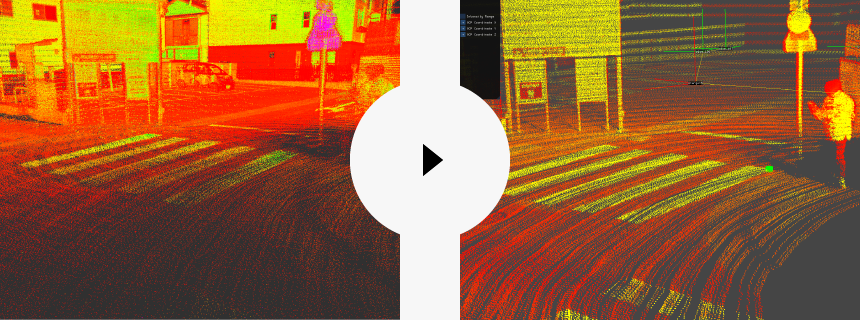
3D Data Measurement System ‘SEAMS’

The first step involves capturing real-world data using a 3D measurement system.
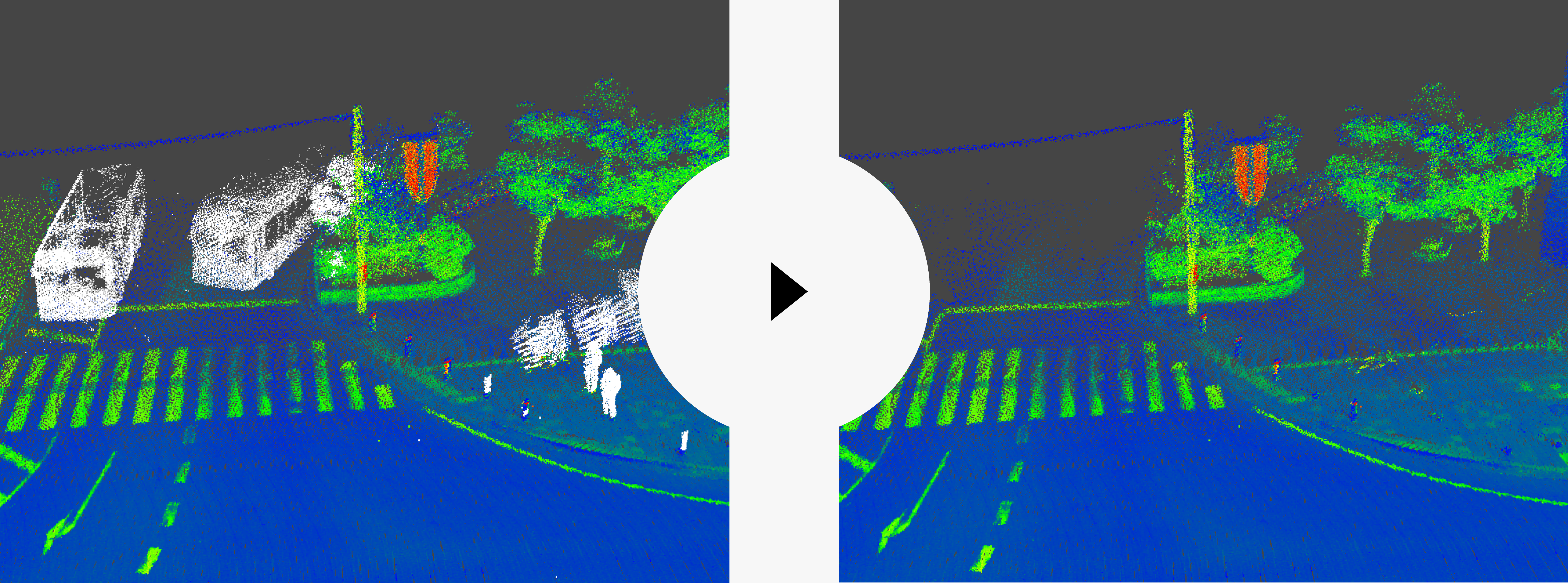
3D Point Cloud Mapping Software ‘MAP IV Engine’

The second step processes the captured data using mapping software (MAP IV Engine) to recreate the environment and obtain a 3D point cloud map.
Point Cloud Classification Software ‘Mapfourmer’
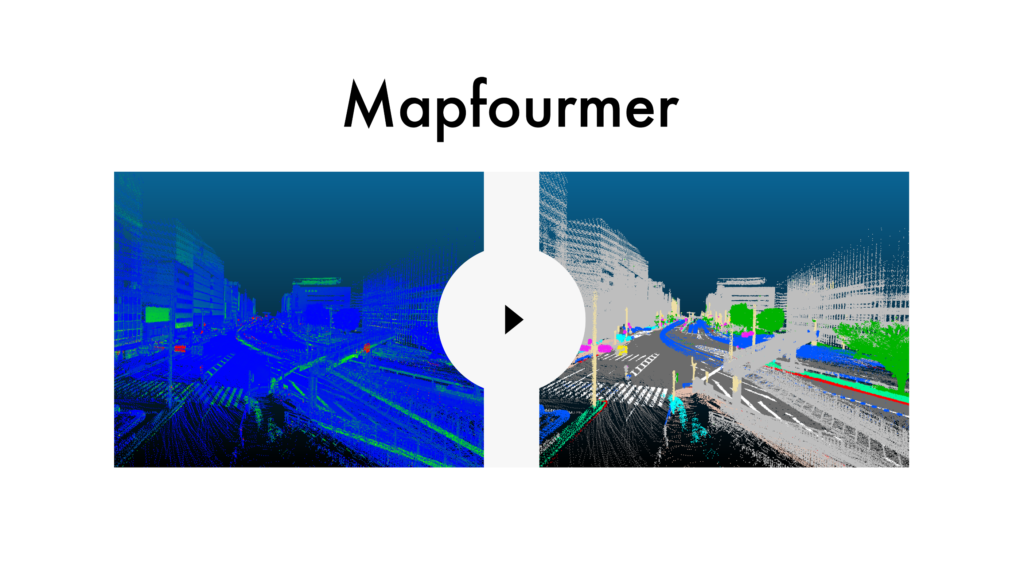
Finally, to remove dynamic objects such as vehicles, pedestrians and other undesired objects on the 3D point cloud map. The data is processed using Mapfourmer which categorize each point in the map. Based on this information, the point cloud map is filtered.
Key Features
Competitive Cost-Performance
Despite using relatively low-cost measurement systems, our “MAP IV Engine” mapping software offers accuracy that rivals that of Mobile Mapping Systems (MMS). It can generate maps compliant with Map Information Level 250 standards, which require a horizontal position standard deviation of 0.12m or less.
*The system’s accuracy may vary depending on sensor configuration and system operating conditions.

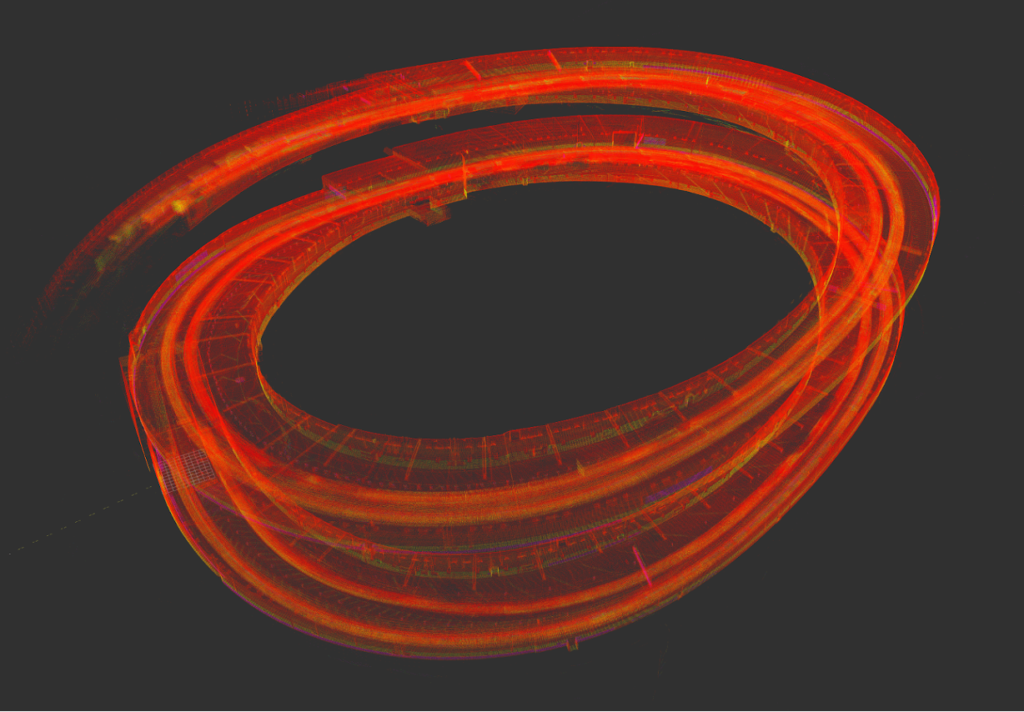
High Robustness Across Various Environments
With the integration of Global Navigation Satellite System (GNSS), Inertial Measurement Units (IMU), and vehicle speed odometry, it is feasible to generate exact 3D point cloud maps, even in challenging scenarios where traditional Simultaneous Localization and Mapping (SLAM) systems would often degrade or fail, such as featureless open areas and places with monotonous landscapes like tunnels and staircases.
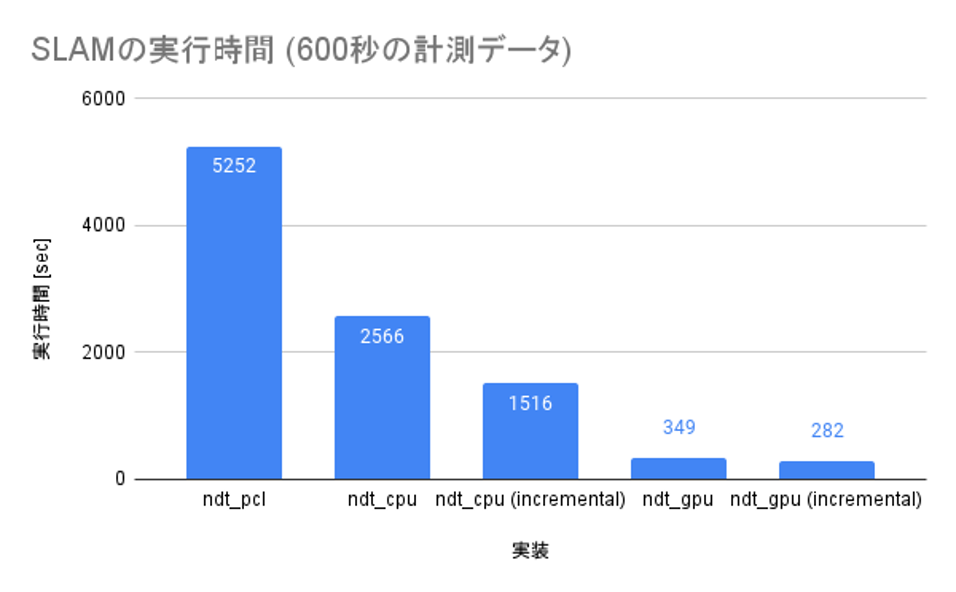
Rapid Point Cloud Processing
Leveraging the power of parallel computing with multi-threading and GPU acceleration, our system can process point clouds as quickly as the data is captured.
User-Friendly Interface
Designed for simplicity, our interface ensures easy operations, enabling users to generate 3D maps effortlessly without any specialized expertise.

Compatible with Various Measurement Methods
MAP IV Engine can process data acquired from multiple measurement platforms, such as vehicles, mobile robots, backpacks, drones, and other customized measuring systems. This versatility enables users to accomplish a broad range of use cases.

Delivery Methods
Licence Agreement
We provide annual licenses for on-premises deployment.
Trial versions are also available; please feel free to contact us.
Support System
Technical Support
Throughout the license duration, we provide comprehensive technical support for software usage.