About SEAMS
SEAMS (Small, Easy, and All-around Mapping System) is a 3D data measurement system designed to capture three-dimensional spatial information accurately and efficiently. Equipped with multiple sensors required for point cloud generation, SEAMS enables easy and efficient data collection over large areas in both indoor and outdoor environments, even without specialized technical knowledge.
The system is available in two models: the wearable ME model and the vehicle-mounted LX model. We provide recommendations on the most suitable model based on the specific environmental conditions of your measurement application.

Wearable Model ME

Vehicle-mounted Model LX
Examples of 3D Mapping System Applications
Data Collection while walking

Public surveying in urban areas, Facility inspections inside factories, and map generation for autonomous mobile robots
Data Collection while driving

Map creation for car navigation and autonomous driving, Maintenance of tunnels and power transmission/distribution infrastructure
3D Point Cloud Generation and Post-Processing Workflow
To generate 3D point clouds, specialized software designed for processing such data is necessary. The MAP IV Engine, which is MAP IV’s proprietary system for 3D point cloud processing, integrates seamlessly with SEAMS. By employing SEAMS, users can capture synchronized and accurate sensor data to generate high-quality maps.
3D Data Measurement System
(SEAMS)

The first step involves capturing real-world data using a 3D measurement system.
3D Point Cloud Mapping Software
(MAP IV Engine)

The second step involves processing the data captured using mapping software (MAP IV Engine) to recreate the environment and obtain a 3D point cloud map.
Point Cloud Classification Software
(Mapfourmer)
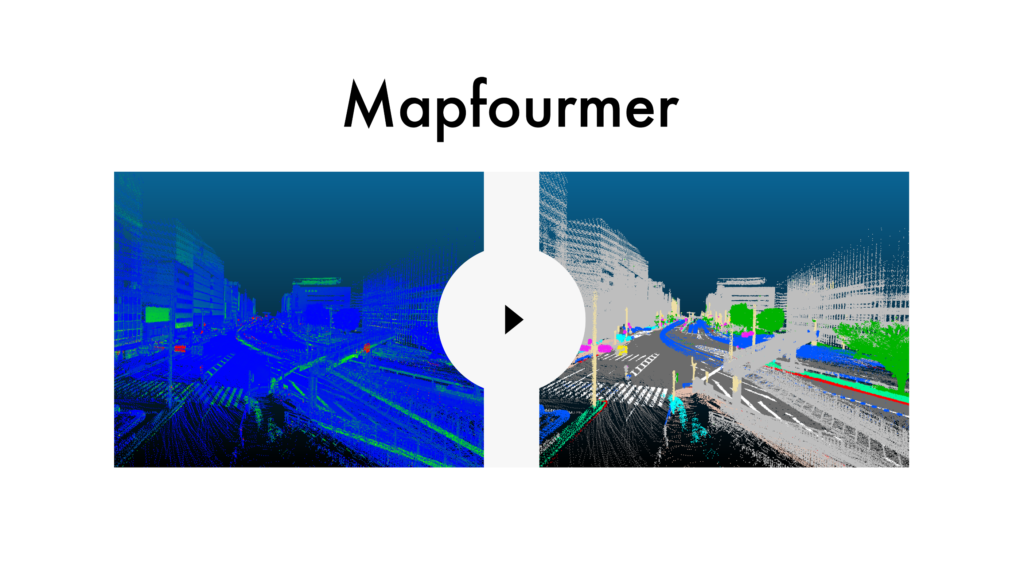
Finally, to remove dynamic objects such as vehicles, pedestrians, and other undesired objects from the 3D point cloud map. MAP IV provides Mapfourmer, which categorizes each point in the map. Based on this information, the point cloud map is filtered.
Key Features
Competitive Cost-Performance
Pairing SEAMS with the MAP IV Engine enables the creation of 3D maps comparable to MMS (Mobile Mapping System) in terms of accuracy but at a fraction of the cost. It can produce maps that are compliant with the Map Information Level 250 standards (with a horizontal position standard deviation of 0.12m or less).
*The system’s accuracy may vary depending on sensor configuration and system operating conditions.

High Robustness Across Various Environments
With the integration of GNSS, IMU, and vehicle speed sensors, it is possible to create highly accurate 3D point cloud maps, even in challenging scenarios where traditional SLAM systems would often degrade or fail. This includes featureless open areas and places with monotonous landscapes, such as tunnels and staircases.

Enhanced Measurement Efficiency with Improved Processing Speed
SEAMS offers faster processing speeds compared to traditional approaches based on Total Station (TLS) for up to a 44%, and up to a 74% compared to MMS, leading to significant improvements in measurement efficiency.
Public Survey Work:
Using the SEAMS Backpack leads to a 44% reduction in survey time compared to TLS
3D Road Mapping:
Using SEAMS LX instead of MMS results in 74% reduction in measurement duration
Intuitive UX Design
No dedicated controller needed. Simply use your smartphone or tablet to operate the measurements. Additionally, you can monitor GNSS reception status and view real-time camera images.

Key Hardware Advantages
- Portability: Designed for easy transport. It can be stored in a dedicated case and shipped via courier.
- Quick Start, Accurate Results: After startup, only a simple calibration is required to begin data measurement with stable accuracy, regardless of the environment, by anyone, and without time-consuming setup.
- 360° Camera Support: Vehicle-mounted enables the capture of rich visual data. It can be mounted on standard roof carriers, ensuring compatibility with a variety of vehicle models.

*Measurement accuracy and processing time may vary depending on environmental conditions and the software used. For further details, please contact us.
*Depending on the vehicle model and the shape of the roof carrier, installation may not be possible. Please consult us in advance.
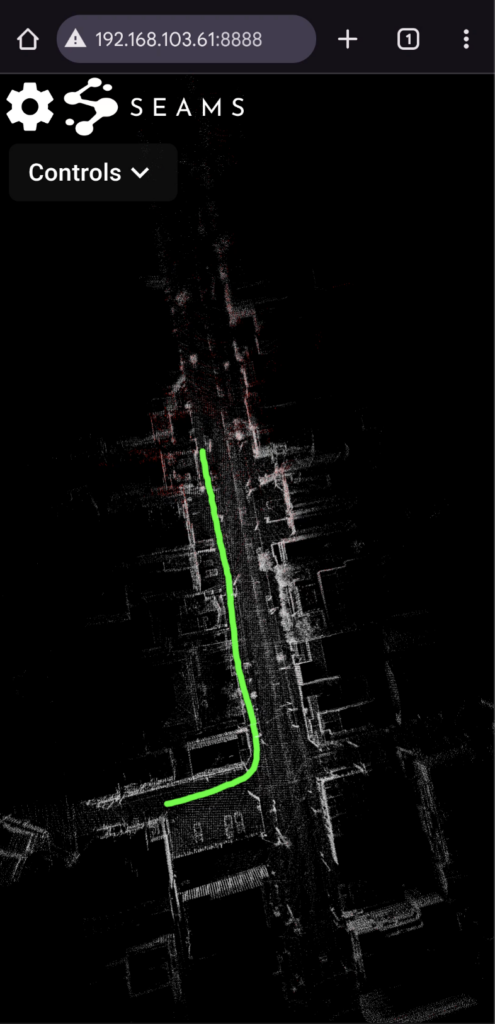
Real-time mapping for immediate on-site verification
SEAMS displays the scanned point cloud data in real-time on a smartphone during measurement. This allows users to instantly verify the progress on-site without waiting for data transfer to a PC.
Custom-Made Models
In addition to the two standard models above, we also offer custom-made configurations tailored to specific measurement environments and user requirements.
Whether you need integration into a vehicle, mounting on a robot, or handheld use, the system can be customized for optimal performance in your intended application.
Please do not hesitate to contact us for more information.

Example: Vehicle-Mounted Model with Simple Installation
Support System
Technical Support
Throughout the license duration, we provide technical support for software usage.